Design and Development of a Low-Cost Multi-Channel Re-Programmable Electro-Pneumatic Actuator Kit
Keywords:
Pneumatic Actuator, Electro-Pneumatic, Pneumatic Kit, Research and Development, RoboticsAbstract
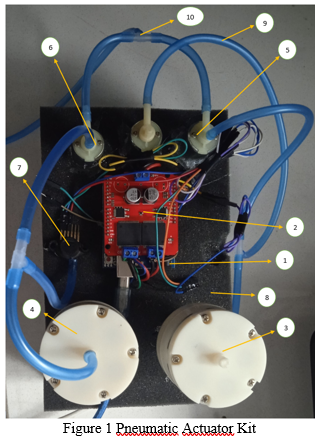
The objective of the research was to develop a low-cost, multi-channel electro-pneumatic actuator kit that would be conveniently accessible for students' learning experiences, trainings, and research at the individual and academic level. The essential feature of this kit was the inclusion of multi-channel outputs, which implies that the student may not only examine the behavior of basic pneumatic actuators but also train their minds to operate complicated actuation systems. With this electro-pneumatic actuation kit, a student can build and utilize it in a variety of research areas, as well as regulate a system synchronously or asynchronously with greater efficiency. The device is portable, inexpensive, and simple to use. It has a power source of 12 VDC for the electrical circuit and can provide a maximum pressure of 90 kPa as well as vacuum of -40 kPa. Relays were being integrated to satisfy the smooth automation of the kit. It features the MPX700 differential pressure sensor, which allows the user to measure and manage the needed pressure. All of the components were controlled by the Arduino Board, which is affordable and can be programmed to do the required function. With this research, academic institutions will be able to create their own kits for their students, allowing them to discover numerous new inventive concepts.
Downloads
References
Mykhailyshyn, R., Savkiv, V., Maruschak, P., & Xiao, J. (2022). A systematic review on pneumatic gripping devices for industrial robots. Transport, 37(3), 201-231.
Greco, C., Kotak, P., Pagnotta, L., & Lamuta, C. (2022). The evolution of mechanical actuation: from conventional actuators to artificial muscles. International Materials Reviews, 67(6), 575-619.
Li, H., Yao, J., Zhou, P., Chen, X., Xu, Y., & Zhao, Y. (2020). High-force soft pneumatic actuators based on novel casting method for robotic applications. Sensors and Actuators A: Physical, 306, 111957.
Moghadam, A. A. A., Caprio, A., Alaie, S., Min, J. K., Dunham, S., & Mosadegh, B. (2019). Rapid manufacturing of thin soft pneumatic actuators and robots. Journal of visualized experiments: JoVE, (153).
Ke, X., Jang, J., Chai, Z., Yong, H., Zhu, J., Chen, H., ... & Wu, Z. (2022). Stiffness preprogrammable soft bending pneumatic actuators for high-efficient, conformal operation. Soft Robotics, 9(3), 613-624.
Jin, T., Li, L., Wang, T., Wang, G., Cai, J., Tian, Y., & Zhang, Q. (2021). Origami-inspired soft actuators for stimulus perception and crawling robot applications. IEEE Transactions on Robotics, 38(2), 748-764.
Grgi?, I., Wertheimer, V., Karakaši?, M., & Ivandi?, Ž. (2021). Development of a 3D printed double-acting linear pneumatic actuator for the tendon gripping. Polymers, 13(15), 2528.
Tani, K., Nabae, H., Endo, G., & Suzumori, K. (2020). Proposal and prototyping of self-excited pneumatic actuator using automatic-flow-path-switching-mechanism. IEEE Robotics and Automation Letters, 5(2), 3058-3065.
Tawk, C., & Alici, G. (2021). A Review of 3D?Printable Soft Pneumatic Actuators and Sensors: Research Challenges and Opportunities. Advanced Intelligent Systems, 3(6), 2000223.
Zhong, Y., Yu, B., & Yu, H. (2022). Design and study of scissor-mechanism-based pneumatic actuator with a characteristic of bidirectional contraction. IEEE/ASME Transactions on Mechatronics, 27(4), 2080-2088.
Ohara, K., Iwazawa, R., & Kaneko, M. (2022). Modeling and analysis of a high-speed adjustable grasping robot controlled by a pneumatic actuator. Robotics, 11(1), 27.
Wang, H., Cheng, X., Huang, P., Yu, M., Ma, J., Peng, S., ... & Jiao, Z. (2022, March). A Soft Electro-Hydraulic Pneumatic Actuator with Self-Sensing Capability toward Multi-Modal Haptic Feedback. In Actuators (Vol. 11, No. 3, p. 74). MDPI.
Li, B., Cao, H., Greenspan, B., & Lobo, M. A. (2022). Development and evaluation of pneumatic actuators for pediatric upper extremity rehabilitation devices. The Journal of The Textile Institute, 113(7), 1372-1379.
Yu, Q., Li, F., & Tan, X. (2023). Influence Analysis and Performance Optimization of a Pneumatic Actuator Exhaust Utilization System. Strojniški vestnik-Journal of Mechanical Engineering, 69(3-4), 119-134.
Shin, T., Teranishi, K., & Kogiso, K. (2022). Cyber-secure pneumatic actuator system equipped with encrypted controller and attack detectors. Advanced Robotics, 36(9), 438-449.
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2023 Uzam Haider, Raheela Mughal, Fatima Sheikh

This work is licensed under a Creative Commons Attribution 4.0 International License.
Copyright on any article in the International Journal of Engineering and Applied Physics is retained by the author(s) under the Creative Commons license, which permits unrestricted use, distribution, and reproduction provided the original work is properly cited.
License agreement
Authors grant IJEAP a license to publish the article and identify IJEAP as the original publisher.
Authors also grant any third party the right to use, distribute and reproduce the article in any medium, provided the original work is properly cited.
Most read articles by the same author(s)
- Uzam Haider, Shahid Rasheed, Tanveer Ahmed, Faizan Ahmed, Ali Nawaz, Aamir Rajper, Abid ur Rasool, Applications of Augmented Reality in Industrial Manufacturing in the Era of Industry 5.0 , International Journal of Engineering and Applied Physics: Vol. 5 No. 1: January 2025
- Uzam Haider, Shahid Rasheed, Ali Nawaz, Sadaqat Ali, Ammar Naeem, Abdul Aziz Memon, Bilal Ahmed Arain, Advanced GUI-Based Four-Wheel Independent Steering Control Research Robocar , International Journal of Engineering and Applied Physics: Vol. 5 No. 1: January 2025