Advanced GUI-Based Four-Wheel Independent Steering Control Research Robocar
Keywords:
4WIS, Autonomous Vehicle Control, Intelligent Steering Systems, GUI-Based Control, Educational RoboticsAbstract
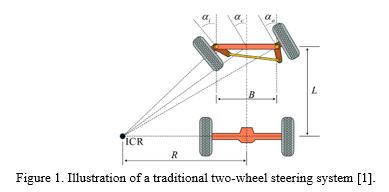
The automotive industry is transforming rapidly due to technological advancements in propulsion systems, connectivity, and steering control mechanisms. Steering systems are vital for vehicle manoeuvrability, safety, and performance, making them a major focus. Traditionally, vehicles used two-wheel steering, where front wheels control direction and rear wheels follow. While effective in standard driving, these systems struggle with complex manoeuvres, lacking agility, and precision, thus compromising safety and performance. This project developed a prototype GUI-based development kit that allows researchers to intuitively control and monitor the four-wheel independent steering system, providing real-time feedback and seamless transitions between modes. The vehicle can switch from straight-line to independent steering in under a second, demonstrating rapid response capabilities. Wireless control over long distances increases its versatility in research and development scenarios. Innovative features like parallel parking and diagonal mode enhance manoeuvrability, allowing the vehicle to move sideways or diagonally in tight spaces. This kit significantly impacts vehicle control technology, offering a flexible platform for researchers to develop and test steering algorithms, accelerating innovation, and advancing autonomous vehicle systems.
Downloads
References
F. Ma, J. Shi, Y. Yang, J. Li, and K. Dai, "ACK-MSCKF: Tightly-coupled Ackermann multi-state constraint Kalman filter for autonomous vehicle localization," Sensors, vol. 19, no. 21, p. 48, 2019.
P. Hang and X. Chen, "Towards autonomous driving: Review and perspectives on configuration and control of four-wheel independent drive/steering electric vehicles," in Actuators, vol. 10, no. 8, p. 184, Aug. 2021.
L. Paull et al., "Duckietown: An open, inexpensive, and flexible platform for autonomy education and research," 2017.
S. Karaman, A. Anders et al., "Project-based, collaborative, algorithmic robotics," Semantic Scholar, 2017.
M. O’Kelly et al., "F1/10: An open-source autonomous cyber-physical platform," 2019
ResearchGate, "1/10th scale autonomous vehicle based on convolutional neural network," 2020.
Jetracer, "An autonomous AI racecar using NVIDIA Jetson Nano," 2019.
C. Rother, Z. Zhou, and J. Chen, "Development of a four-wheel steering scale vehicle for research and education on autonomous vehicle motion control," IEEE Robotics and Automation Letters, 2023.
https://www.raspberrypi.com/products/raspberry-pi-3-model-b-plus/
https://www.ebay.com.my/itm/154612194335
https://robocraze.com/blogs/post/what-is-ultrasonic-sensor
S. Yim, "Comparison among active front, front independent, 4-wheel and 4-wheel independent steering systems for vehicle stability control," Electronics, vol. 9, no. 5, p. 798, 2020.
Y. Jeong and S. Yim, "Model predictive control-based integrated path tracking and velocity control for autonomous vehicle with four-wheel independent steering and driving," Electronics, vol. 10, no. 22, p. 2812, 2021.
A. Kosmidis, G. Ioannidis, G. Vokas, and S. Kaminaris, "A novel real-time robust controller of a four-wheel independent steering system for EV using neural networks and fuzzy logic," Mathematics, vol. 11, no. 21, p. 4535, 2023.
Y. Qiao, X. Chen, and D. Yin, "Coordinated control for the trajectory tracking of four-wheel independent drive–four-wheel independent steering electric vehicles based on the extension dynamic stability domain," Actuators, vol. 13, no. 2, p. 77, Feb. 2024.
W. Zhang, L. Drugge, M. Nybacka, J. Jerrelind, and Z. Wang, "Exploring four-wheel steering for trajectory tracking of autonomous vehicles in critical conditions.
Z. Li, X. Jiao, and T. Zhang, "Robust H? output feedback trajectory tracking control for steer-by-wire four-wheel independent actuated electric vehicles," World Electric Vehicle Journal, vol. 14, no. 6, p. 147, 2023.
Y. Li, Y. Cai, X. Sun, H. Wang, Y. Jia, Y. He, ... and Y. Chao, "Trajectory tracking of four-wheel driving and steering autonomous vehicle under extreme obstacle avoidance condition," Vehicle System Dynamics, vol. 62, no. 3, pp. 601-622, 2024.
L. Men, "Simulation analysis of vehicle four-wheel steering control.
J. Torgersen, "Mobile agricultural robot: Independent four wheel Ackerman steering," Master's thesis, Norwegian University of Life Sciences, Ås, 2014.
F. Galasso, D. L. Rizzini, F. Oleari, and S. Caselli, "Efficient calibration of four wheel industrial AGVs," Robotics and Computer-Integrated Manufacturing, vol. 57, pp. 116-128, 2019.
K. E. Klindworth, "Dynamic modeling for the path tracking control of a four-wheel independent-drive, four-wheel independent-steer autonomous ground vehicle," Master's thesis, North Dakota State University, 2017.
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2025 Uzam Haider, Shahid Rasheed, Ali Nawaz, Sadaqat Ali, Ammar Naeem, Abdul Aziz Memon, Bilal Ahmed Arain

This work is licensed under a Creative Commons Attribution 4.0 International License.
Copyright on any article in the International Journal of Engineering and Applied Physics is retained by the author(s) under the Creative Commons license, which permits unrestricted use, distribution, and reproduction provided the original work is properly cited.
License agreement
Authors grant IJEAP a license to publish the article and identify IJEAP as the original publisher.
Authors also grant any third party the right to use, distribute and reproduce the article in any medium, provided the original work is properly cited.
Most read articles by the same author(s)
- Uzam Haider, Shahid Rasheed, Tanveer Ahmed, Faizan Ahmed, Ali Nawaz, Aamir Rajper, Abid ur Rasool, Applications of Augmented Reality in Industrial Manufacturing in the Era of Industry 5.0 , International Journal of Engineering and Applied Physics: Vol. 5 No. 1: January 2025
- Uzam Haider, Raheela Mughal, Fatima Sheikh, Design and Development of a Low-Cost Multi-Channel Re-Programmable Electro-Pneumatic Actuator Kit , International Journal of Engineering and Applied Physics: Vol. 3 No. 3: September 2023