Kinematic Analysis of Omnidirectional Mecanum wheeled Robot
Keywords:
Robotics, Control system, Mechatronics, Mobile robot, Visual predictive controlAbstract
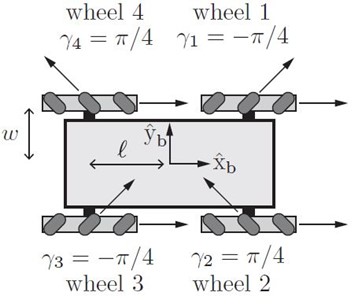
This study used the V-rep simulation environment to develop an omnidirectional, four-wheeled Robot model and perform kinematic analysis using youBot. Given their extensive use, it is essential to understand how Mecanum wheels' speeds convert into robot velocities before moving on to a dynamic model that governs how wheel torques translate into robot accelerations. This paper investigates the rate at which the wheels must be driven given the desired chassis velocity, also limit on the chassis velocity, given a limit on the individual wheel operating speed.
Downloads
References
Deepak BBVL, Parhi Dayal R, & Jha Alok Kumar. (2011). Kinematic Model of Wheeled Mobile Robots. Int. J. on Recent Trends in Engineering & Technology, 05(04), 5–10.
Durand-Petiteville, A., & Cadenat, V. (2020). Mobile Robot Navigation in a Cluttered Environment via Visual Predictive Control. September. https://doi.org/10.48011/asba.v2i1.1451
El-Shenawy, A., Wagner, A., & Badreddin, E. (2007). Kinematics and dynamics analysis for a holonomic wheeled mobile robot. ICINCO 2007 - 4th International Conference on Informatics in Control, Automation and Robotics, Proceedings, 2 RA(January), 485–491. https://doi.org/10.5220/0001650404850491
Gao, X., Li, J., Fan, L., Zhou, Q., Yin, K., Wang, J., Song, C., Huang, L., & Wang, Z. (2018). Review of wheeled mobile robots’ navigation problems and application prospects in agriculture. IEEE Access, 6(September), 49248–49268. https://doi.org/10.1109/ACCESS.2018.2868848
Han, K. L., Choi, O. K., Kim, J., Kim, H., & Lee, J. S. (2009). Design and control of mobile robot with mecanum wheel. ICCAS-SICE 2009 - ICROS-SICE International Joint Conference 2009, Proceedings, September, 2932–2937.
Muir, P. F., & Neuman, C. P. (1987). Kinematic modeling of wheeled mobile robots. Journal of Robotic Systems, 4(2), 281–340. https://doi.org/10.1002/rob.4620040209
Zeidis, I., & Zimmermann, K. (2019). Dynamics of a four-wheeled mobile robot with Mecanum wheels. In ZAMM Zeitschrift fur Angewandte Mathematik und Mechanik (Vol. 99, Issue 12). https://doi.org/10.1002/zamm.201900173
Downloads
Published
How to Cite
Issue
Section
ARK
License
Copyright (c) 2023 Adebayo Haastrup; Walter, Aanuoluwa

This work is licensed under a Creative Commons Attribution 4.0 International License.
Copyright on any article in the International Journal of Engineering and Applied Physics is retained by the author(s) under the Creative Commons license, which permits unrestricted use, distribution, and reproduction provided the original work is properly cited.
License agreement
Authors grant IJEAP a license to publish the article and identify IJEAP as the original publisher.
Authors also grant any third party the right to use, distribute and reproduce the article in any medium, provided the original work is properly cited.